resume.lanhonghao.github.io
蓝宏浩的经历
个人信息
- 蓝宏浩/男/1997
- 机械电子工程/本科/黑龙江工程学院
- 博客:https://blog.lanhonghao.cn
- Github:https://github.com/Lanhonghao
联系方式
- 手机:18319368871
- Email:Lanhonghao@126.com
- QQ:1039167461
- 微信号:18319368871
项目经验
水下滑翔机的设计与制作(2019/3–2020/07)
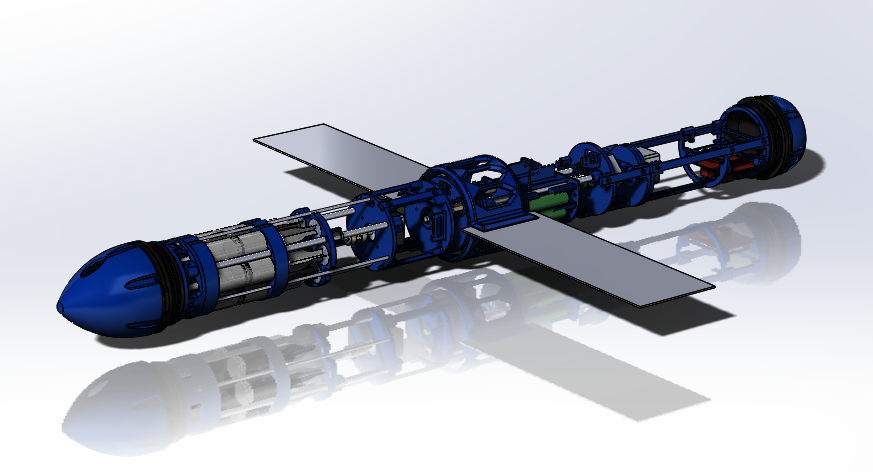

项目描述:
水下滑翔机是实现使机器在水中进行上浮与下潜的功能。并且还可以对水底的环境探测、海洋测绘和海洋生物记录。此项目的意义是它可以替代人工在预先确定的路线下长时间执行水下环境监测任务,能够记录水中的PH值,温度,营养,污染水平。水下滑翔机是一种新型的水下机器人。由于其利用净浮力和姿态角调整获得推进力,能源消耗极小,只在调整净浮力和姿态角时消耗少量能源,并且具有效率高、续航力大(可达上千公里)的特点。虽然水下滑翔机的航行速度较慢,但其制造成本和维护费用低、可重复使用、并可大量投放等特点,满足了长时间、大范围海洋探索的需要。
责任描述:
负责人。全套设备的软硬件的设计和调试。
智能家居实验室改造项目(2017/3-2018/10)

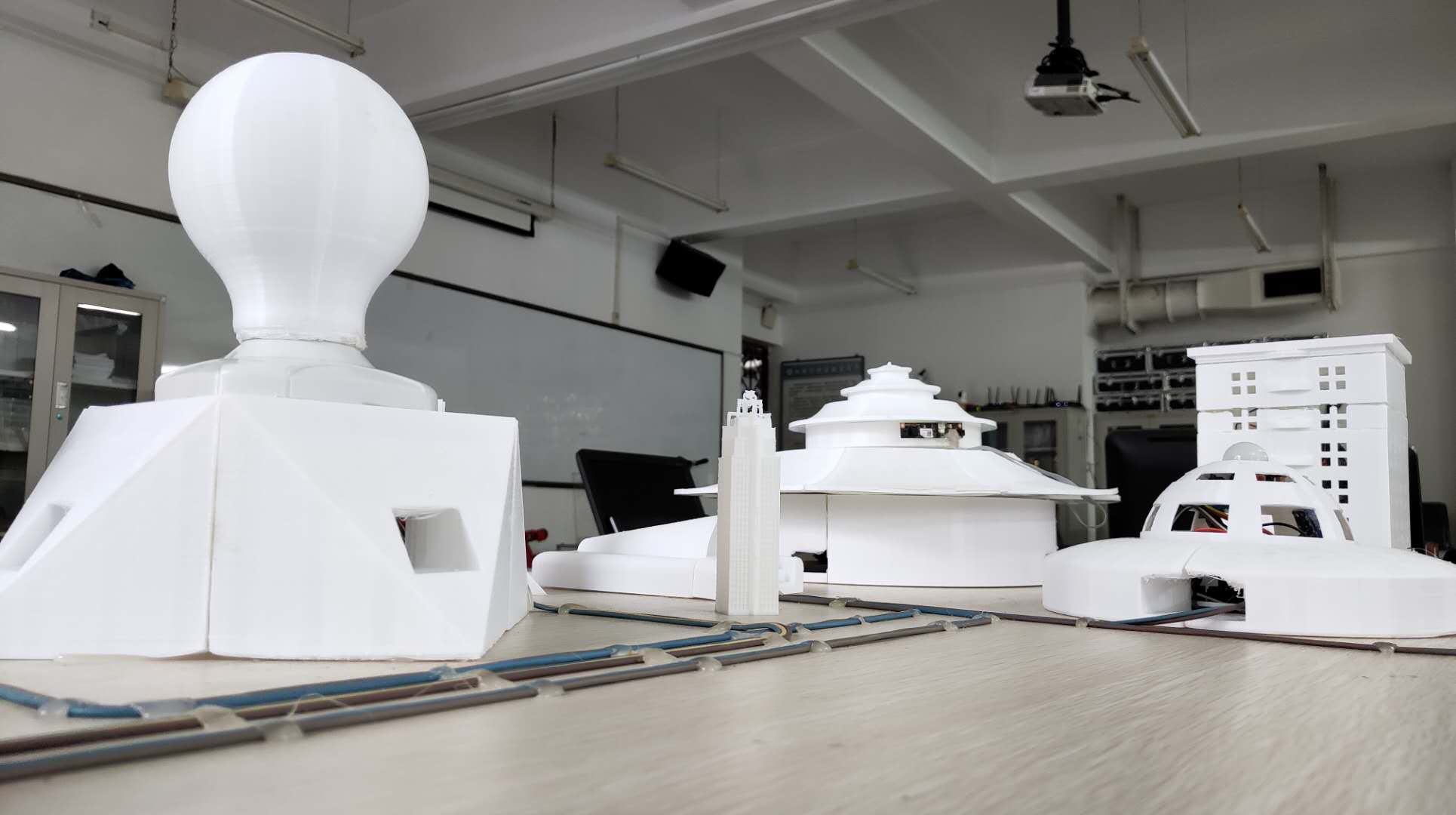
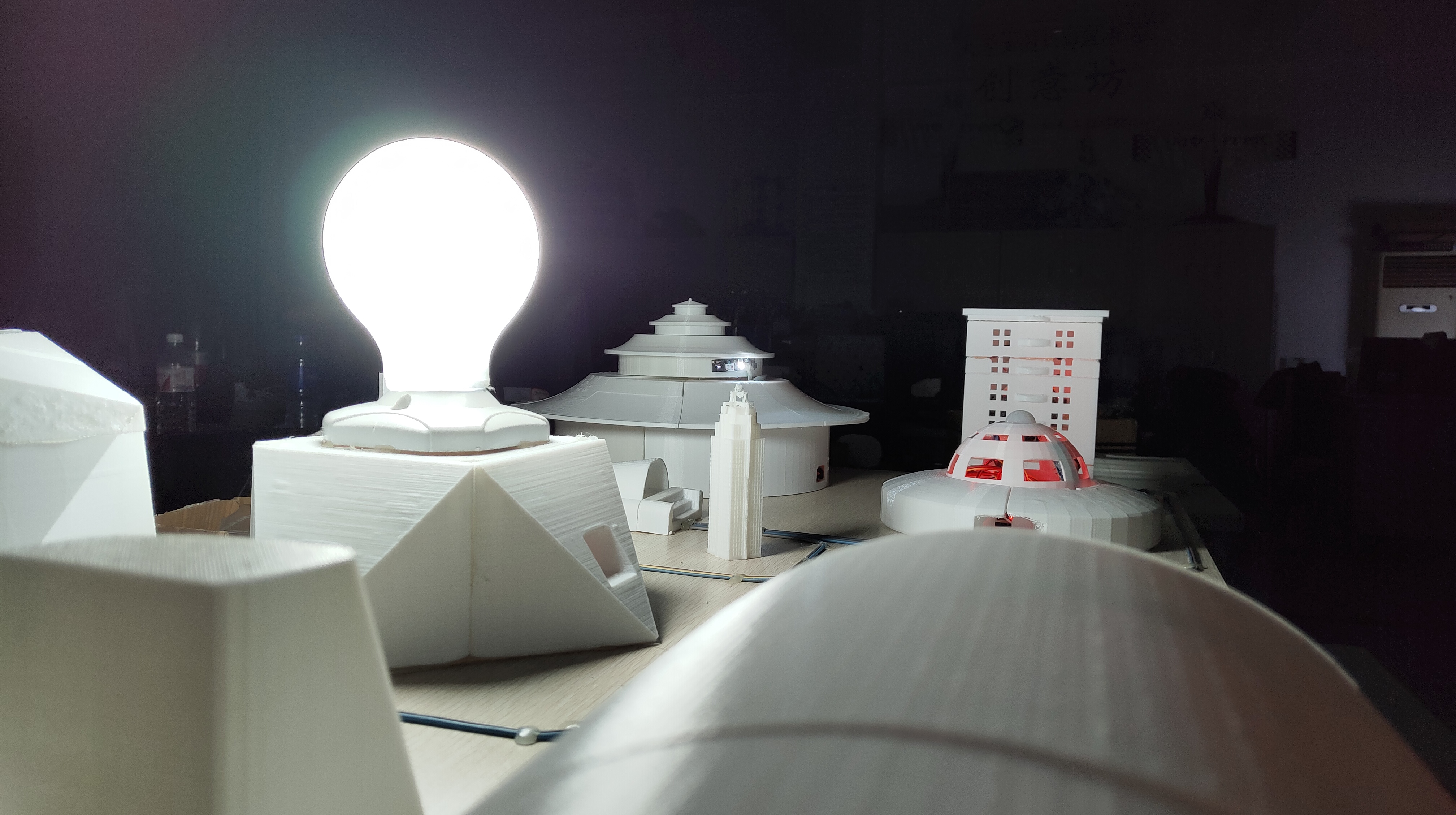
项目描述:
智能家居实验室试点改造项目是国家级大学生创新创业训练计划项目。做一套符合学校工业机器人实验室的智能家居布置。智能家居实验室试点改造项目是为了实验室环境进行设计的。智能家居实验室试点改造项目可以为实验室提升安全性、便利性,并实现节能环保的使用环境。智能家居实验室试点改造项目的实施可以改变固有的管理方式,更加便捷有效地掌握实验室的各方面信息,远程控制设备仪器的操作使用。由于不方便展示,于是制作了智能家居实验室改造项目展示板,方便更直观看到效果。
责任描述:
负责人。全套设备的软硬件的设计和调试。
成果说明:
- 国家级大学生创新创业训练计划项目
项目链接:
github:https://github.com/Lanhonghao/openwrt-wr703n-smart-home
六轴机械臂教育平台(2017/9-2018/10)

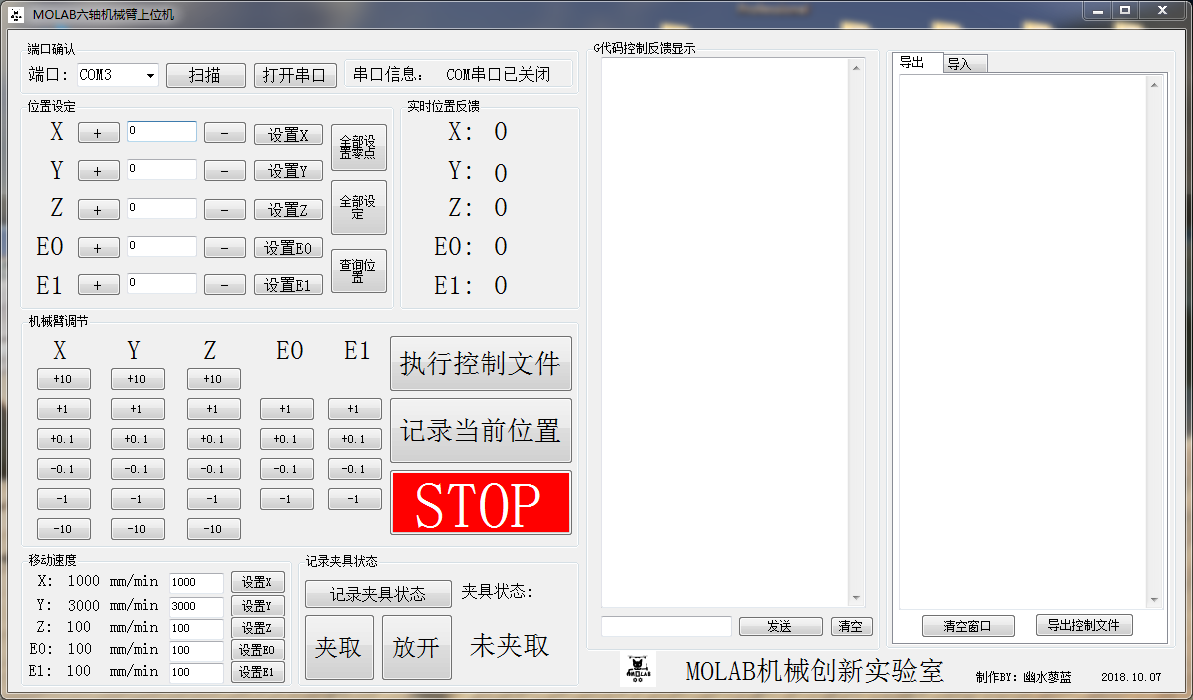
项目描述:
机械臂,在工业上主要用于生产线的自动搬运、装配、焊接、喷涂等工业现场中有广泛的应用。六自由度机械臂是具有成熟完备的运动控制技术与先进的设计和教学理念有机结合的产物,既满足工业现场要求,也是教学、科研机构进行运动规划和编程系统设计的理想对象。 该机械臂的主体结构采用3D打印技术,在满足机械结构强度要求的前提下,具有机械结构质量轻,成本低,适合用于教学演示和大学生创新训练。该项目基于单片机控制,程序修改方便,控制方便和易于操作,该机械臂项目以大学生机器人教育、机器人人才的培养为目的,支持师生对机械臂进行轨迹规划和应用开发研究。
责任描述:
项目成员。上位机软件设计,硬件的部分搭建。
成果说明:
- 2018年“邮储银行杯”黑龙江省智能机器人竞赛创新设计一等奖
项目链接:
github:https://github.com/Lanhonghao/Six-axis_robot_master_computer
自动循迹无线视频遥控安全汽车模型(2018/3-2018/6)
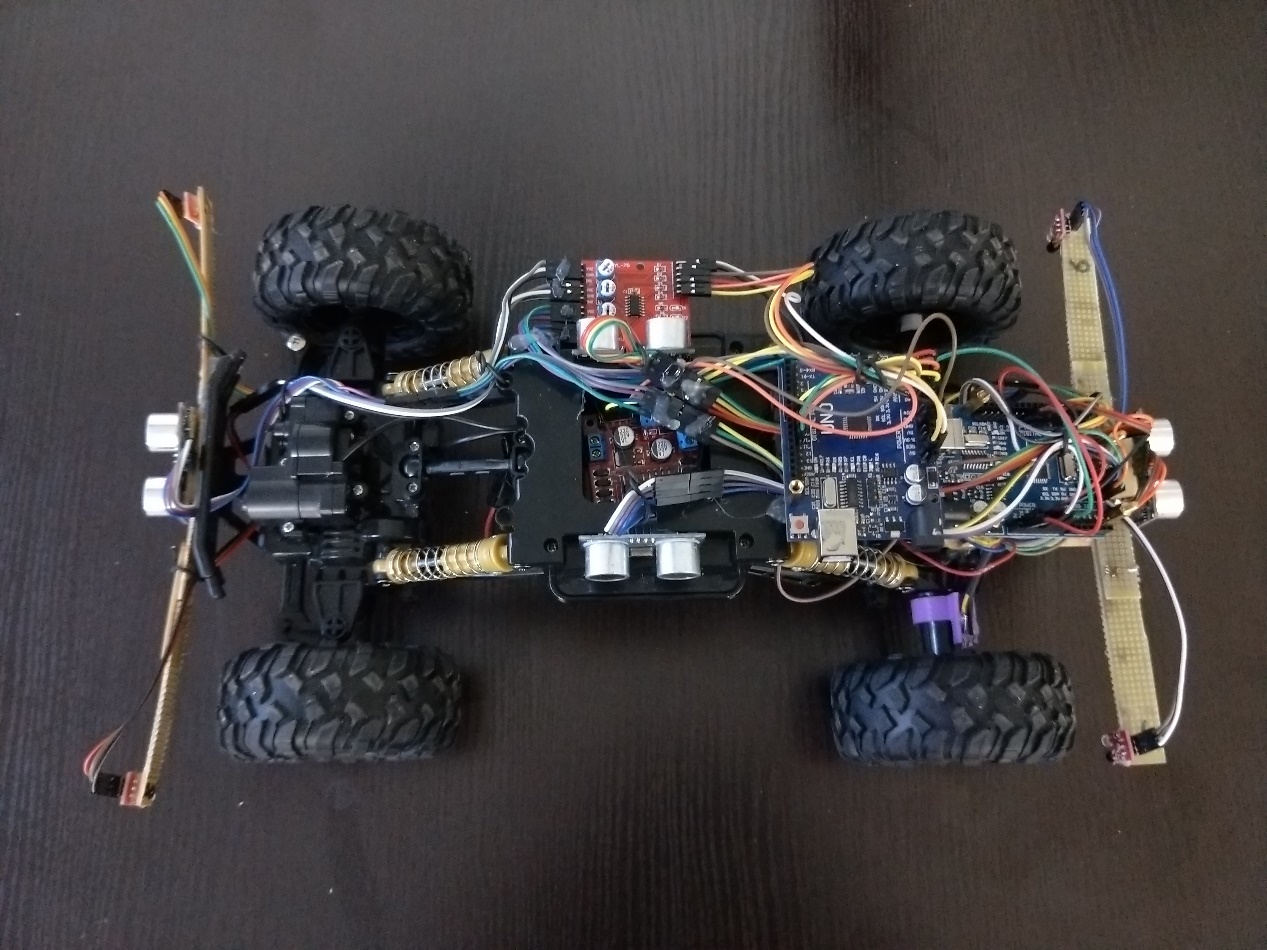
项目描述:
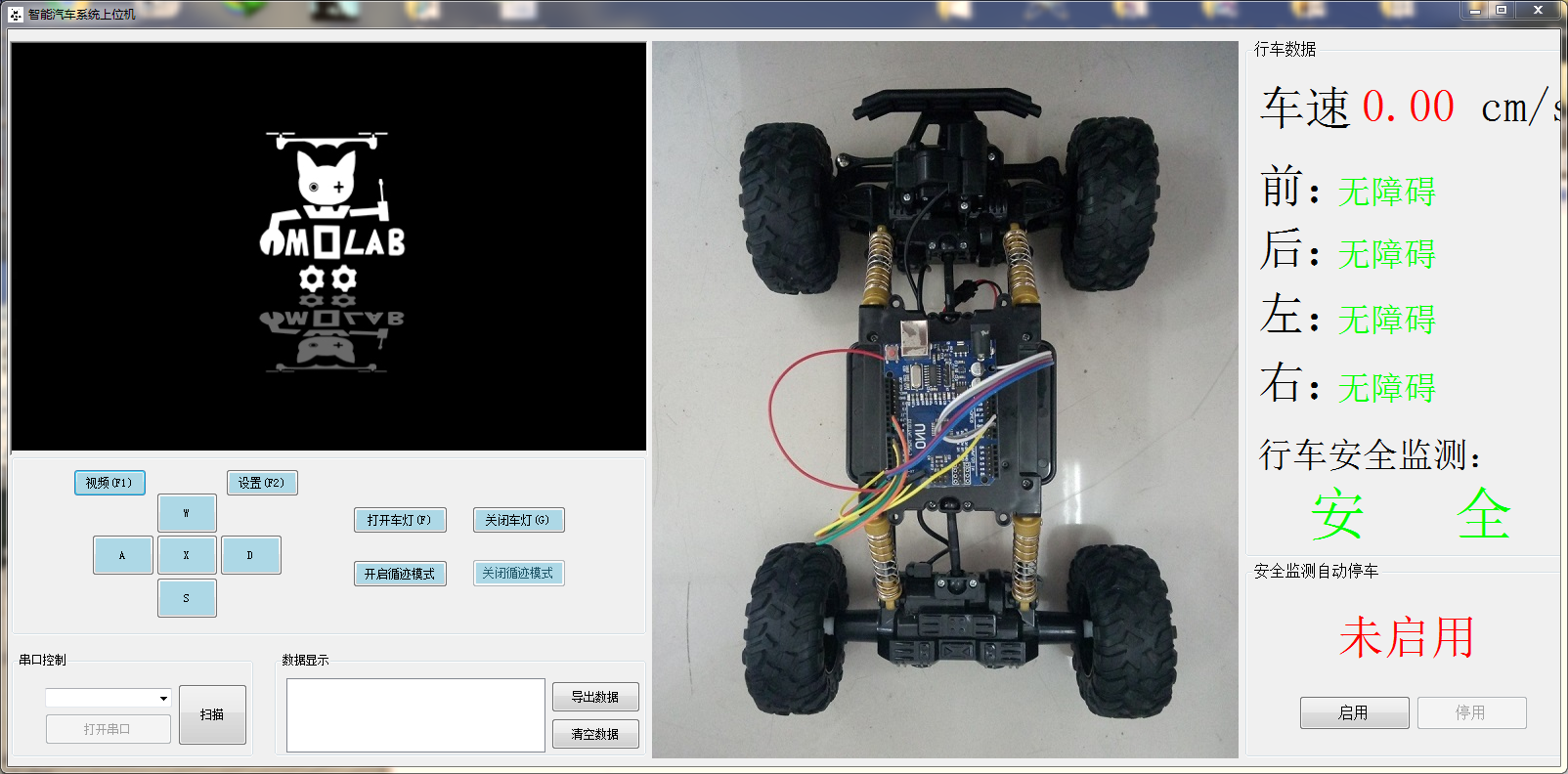
本设计是一种基于单片机控制的简易自动寻迹、无线视频遥控和集成安全判断系统的智能汽车设计方案,包括智能汽车系统构成硬件设计及上位机软件设计控制方法。 在简易自动寻迹模式下,智能汽车以arduino uno为控制核心,用单片机产生pwm波,控制小车速度。智能汽车自动寻迹利用红外光电传感器对路面黑色轨迹进行检测,并将路面检测信号反馈给单片机。单片机对采集到的信号予以分析判断,及时控制驱动电机以调整智能汽车转向,从而使智能汽车能够沿着双黑色轨迹道路自动行驶,实现小车自动寻迹的目的,以此达到模仿真实生活中汽车在道路上的行驶状态。 智能汽车无线遥控是基于C#开发的一款在Windows系统环境下运行的智能汽车上位机,借助于WiFi技术和ZigBee技术设计和实现的一种无线遥控智能汽车新的解决方案。设计以电脑上位机控制平台、WiFi通讯模块、ZigBee数传模块、电机驱动模块等硬件模块组成的智能汽车模型。实现智能汽车的前进、后退、前左转弯、前右转弯、后左转弯、后右转弯等实时控制功能。并加入超声波模块检测智能汽车模型车外环境。
责任描述:
负责人。全套设备的软硬件的设计和调试。
成果说明:
- 2018年全国机器人与人工智能技术大赛(黑龙江赛区)智能汽车设计(模型组)冠军(一等奖)
项目链接:
github:https://github.com/Lanhonghao/wificar
多用途复杂地形救援机器人的设计与制作(2018/4-2018/6)
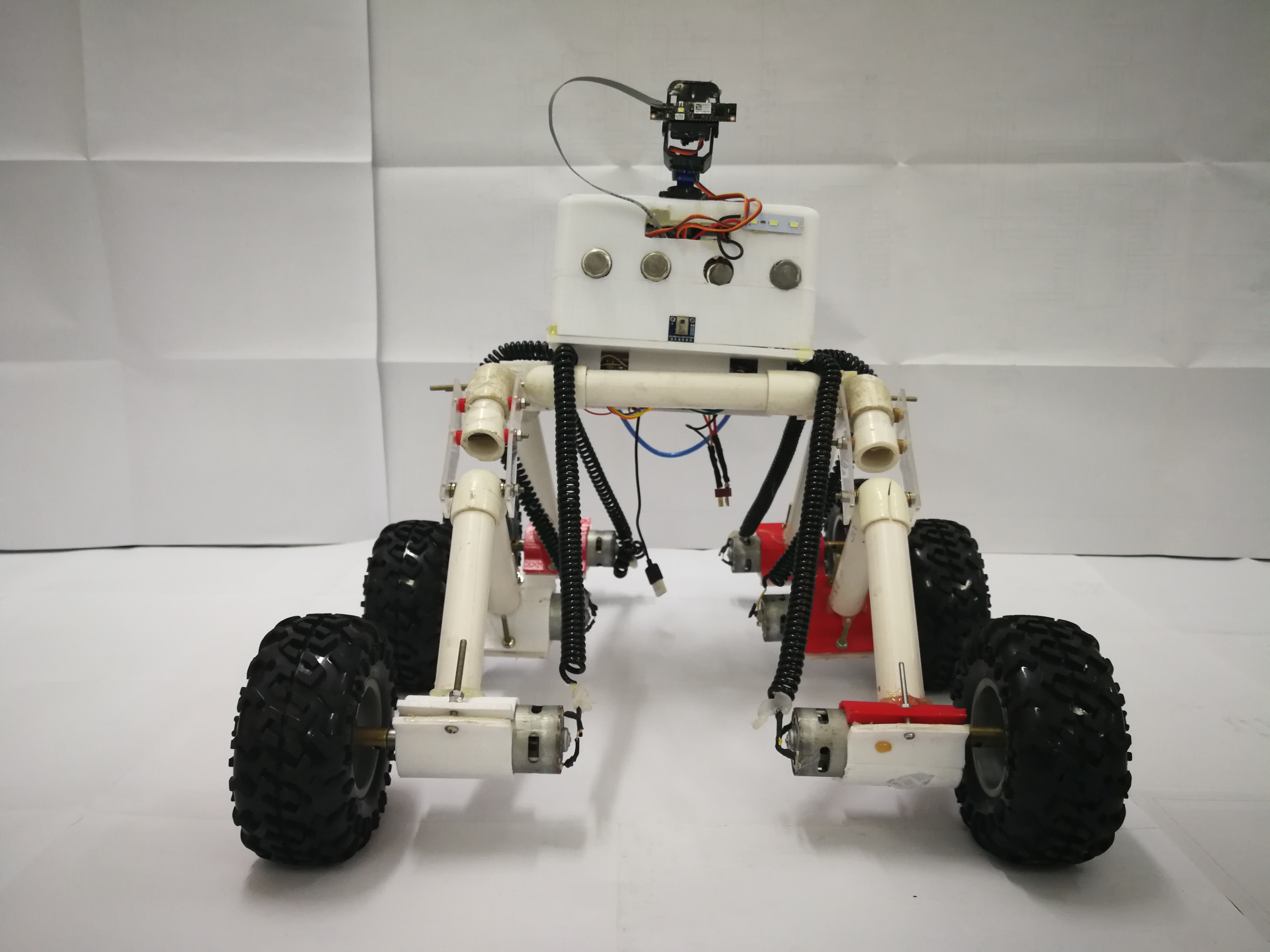
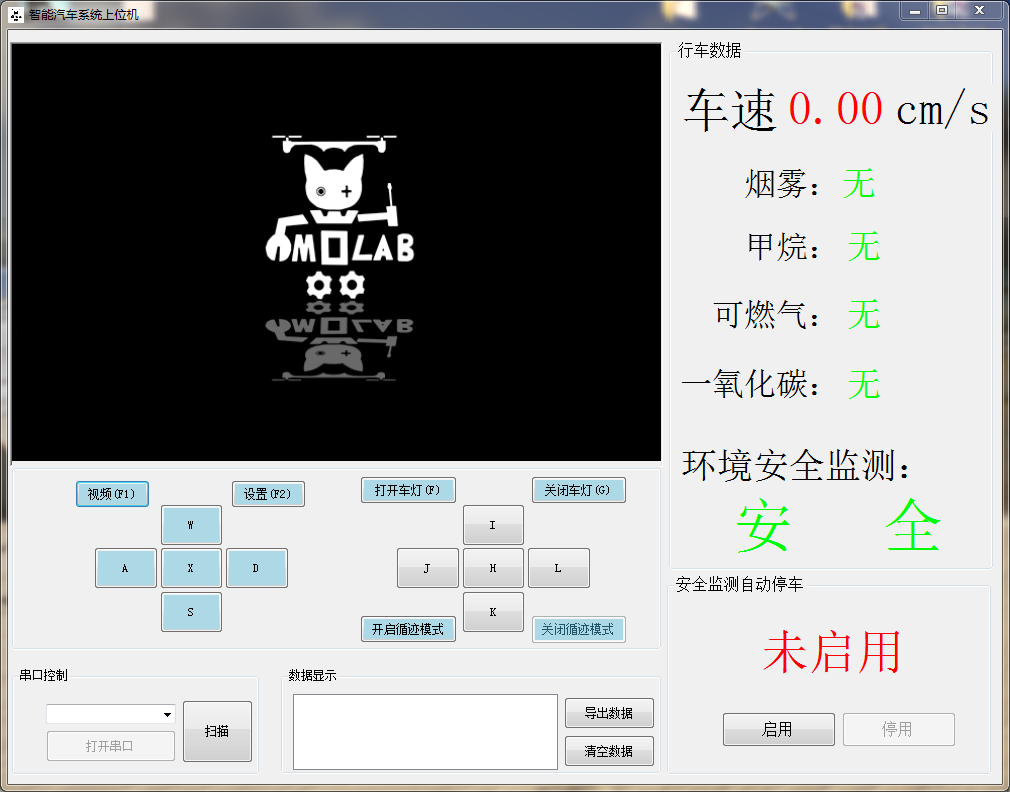
项目描述:
在Arduino单片机与WI-FI通讯技术基础上,进行设计并制作一种多用途复杂地形救援机器人。该机器人具有远程图像传输,WI-FI远程控制,空气检测,生命特征检测功能。用来代替特殊环境人工搜救,降低救援人员的伤亡数量。 设计内容有整体机械结构及行走方案设计,下位机系统软硬件设计,上位机软件设计。通过机器人进行搜索,实时对上位机进行数据反馈,以确认生命特征、环境以及地貌等信息。为搜救人员提供有效、准确的信息。 该救援机器人能够准确传回清晰图像,生命特征检测,易燃易爆气体检测,能够连续翻越障碍物进行搜索,对即将救援地点进行全方位了解,从而达到降低危险的目的。
责任描述:
项目成员。Arduino单片机的编程,WI-FI通讯的搭建,上位机软件设计。
数控机床监控(2017/4-2017/5)
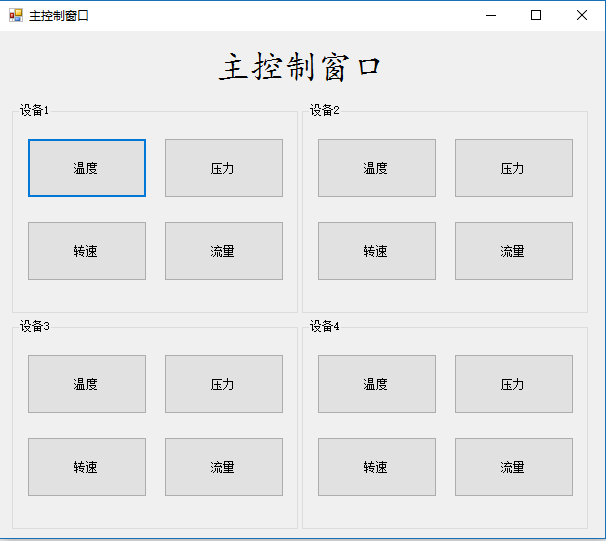
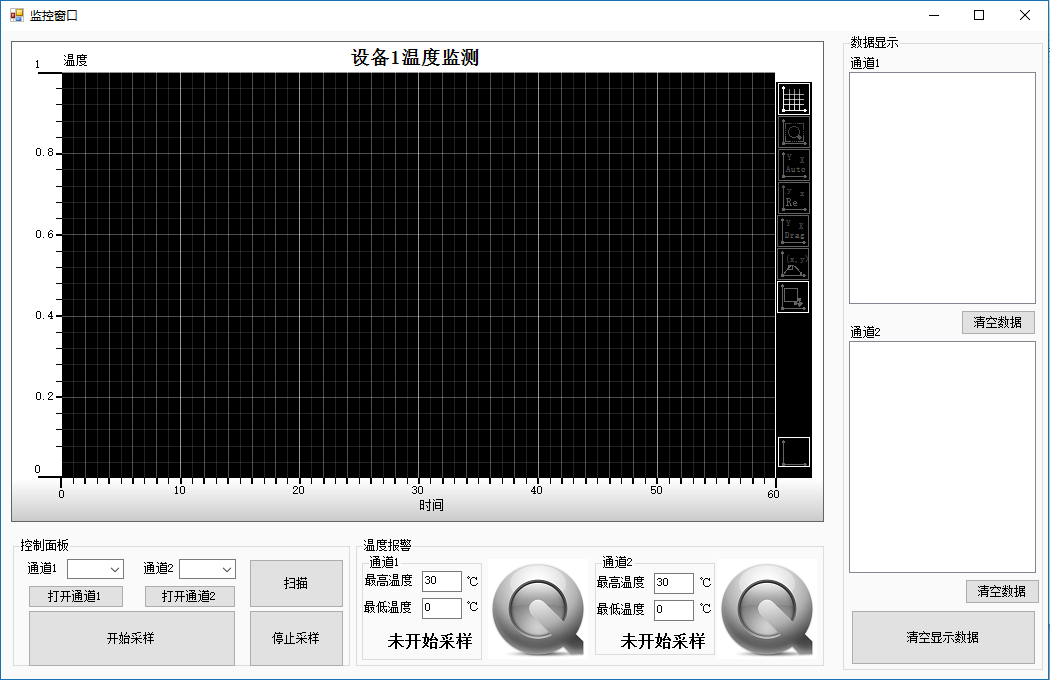
项目描述:
该数控机床监控上位机使用C#语言编写。该上位机通过主界面窗口进行对子窗口的调用,分别监控机床设备的温度、压力、转速和流量。针对于子窗口程序的设计和优化,使子窗口的使用更方便更实用。针对于子窗口主程序,一共由五大模块组成,分别是与主窗口之间参数的传递、与下位机之间的串口通信、数据的波形化显示、实时数据的显示和报警系统。
责任描述:
负责人。整套上位机的设计,以及Arduino检测装置。
实习经验
哈尔滨火萤科技有限公司(2017/03-2018/10)
工作性质::研发测试
工作描述: 1、参与火萤科技弓箭选箭器项目的生产调试
2、参与火萤科技面向无人机市场的一代安全伞项目的研发测试
3、主要负责火萤科技面向无人机市场的一代安全伞项目的宣传推广
个人经历
校内经历:
- 2016年9月 参加工程学人科技协会社团
- 2016年10月 学习Arduino单片机
- 2016年12月 加入机械创新实验室
- 2016年12月 参加2016“哈工海渡杯”工业机器人虚拟仿真大赛决赛
- 2017年4月 学习C#上位机编写
- 2017年5月 使用C#完成数控机床监控上位机设计
- 2017年6月 参加第十五届“挑战杯”黑龙江省大学生课外学术科技作品竞赛
- 2017年6月 作为负责人申请黑龙江省大学生创新创业训练计划项目(智能家居实验室试点改造项目)并被批准为省级重点大学生创新项目
- 2017年6月 成为“灵莹科技公司”大学生创业实践项目成员
- 2017年6月 竞选工程学人科技协会社团机器人组组长成功
- 2017年7月 参加2017年”大庆杯”第十九届全国机器人锦标赛暨第八届国际仿人机器人奥林匹克大赛
- 2017年8月 学习linux操作系统,了解linux基本的命令操作
- 2017年9月 创建工程学人科技协会社团乔木宣传部兼任负责人
- 2017年9月 参加TRCC第六届全国机器人创意设计大赛暨第七届黑龙江省高校“龙建杯”创新创业机器人设计大赛
- 2017年10月 担任能动量机器人创新团队队长
- 2017年10月 作为学生领队带队参加2017年全国竞技机器人邀请赛
- 2018年5月 使用C#完成多用途复杂地形救援机器人的上位机设计
- 2018年6月 参加“儿童防走失可穿戴无线装置”大学生创业训练项目成员
- 2018年6月 作为学生领队带队参加全国机器人与人工智能技术大赛(黑龙江赛区)
- 2018年6月 担任机械创新实验室学生负责人
- 2018年9月 使用C#完成六轴机械臂教育平台的上位机设计
- 2018年10月 作为学生领队带队参加2018年“邮储银行杯”黑龙江省智能机器人竞赛
- 2019年5月 负责水下滑翔机项目的设计与制作。
校外经历:
- 学校组织校外见习:中国兵器,大顶子山水电站,江苏哈工海渡工业机器人有限公司
校内职务
能动量机器人创新团队队长(2017/10-2020/07)
职务描述:
能动量机器人创新团队队长主要职能负责比赛前与比赛主办方沟通比赛规则,比赛的费用以及出行时间,人数,住宿以及负责团队比赛项目人员配置,器材准备,比赛预算,耗材购买,票据,比赛总结撰写。在职期间参加国家级比赛3个,省级比赛1个,团队获奖项目十余项。
工程学人科技协会社团机器人组组长(2017/6-2018/9)
职务描述:
主要职责是和搭档共同参与社团纳新活动,负责大一新成员的培训,主要内容为人形机器人编程知识以及基本的电路知识,组织机器人组成员的日常培训活动,与会长沟通汇报阶段成果
工程学人科技协会社团乔木宣传部负责人(2017/9-2018/10)
职务描述:
主要负责对于微信公众号的运营,对于每次比赛前的宣传招募新人
获奖证书
- 2016-2017学年第一学期三等奖学金
- 2016-2017学年第二学期三等奖学金
- 2017-2018学年第一学期三等奖学金
- 2018-2019学年第一学期三等奖学金
- 第十五届“挑战杯”黑龙江省大学生课外学术科技作品竞赛二等奖
- 2017年”大庆杯”第十九届全国机器人锦标赛暨第八届国际仿人机器人奥林匹克大赛仿人机器人八人舞比赛一等奖
- 2017年”大庆杯”第十九届全国机器人锦标赛暨第八届国际仿人机器人奥林匹克大赛宠物机器人智能化创新设计比赛一等奖
- TRCC第六届全国机器人创意设计大赛暨第七届黑龙江省高校“龙建杯”创新创业机器人设计大赛机器人舞台表演类戏曲一等奖
- TRCC第六届全国机器人创意设计大赛暨第七届黑龙江省高校“龙建杯”创新创业机器人设计大赛工业机器人技术创意创新一等奖
- 2017年全国竞技机器人邀请赛无人机专项二等奖
- 2017年全国竞技机器人邀请赛机器人舞蹈赛(多人舞)一等奖
- 全国机器人与人工智能技术大赛(黑龙江赛区)智能汽车设计(模型组)冠军(一等奖)
- 全国机器人与人工智能技术大赛(黑龙江赛区)智能文化创意设计二等奖
- 2018年“邮储银行杯”黑龙江省智能机器人竞赛创新设计一等奖
- 国家级大学生创新创业训练计划项目结项证书(智能家居实验室试点改造项目)
- 专利:201820023828.2 六自由度机械手臂(齐建家、陈佳莹、任建鑫、蓝宏浩 )
技能证书
- 大学英语四级证书CET-4(437)
- C1驾驶证
- 三维数字化技术认证证书(UG)
- 全国计算机辅助技术培训项目二维CAD(机械设计方向)证书
技能清单
- 熟悉Arduino 平台C语言程序设计,arduino单片机程序设计及电路设计,接触raspberry pi, plc程序设计。
- 有模电数电调试经验。
- 熟悉UG/Solidworks 3D设计。
- 熟悉使用C#开发上位机软件
- 熟悉Html,能够制作简单的静态网页。
- 了解Linux命令行基础操作。
- 熟练使用AltiumDesigner, keil ,Cura,RobotStudio, Autocad完成相关设计。
- 熟练使用office软件完成文件处理。
个人评价
- 大学阶段有较多机器人类竞赛经历,动手能力强,有较强的创新能力。
- 热爱机器人制作,热爱DIY创作,热爱开源。
- 乐于钻研,勤奋务实,热情随和。
- 爱好阅读,足球运动。
致谢
感谢您花时间阅读我的简历,期待能有机会和您共事。
PDF简历下载:点击这里